German researchers may have an anthropomorphic robot handthat a collision with hard objects, and even the strike, without breaking into pieces survive Hammer built.
In designing the new site, a researcher at the Institute of Roboticsand Mechatronics, German Aerospace Center, part of the (DLR),focused on resilience. You may only have built a robot hand of themost difficult yet.
DLR hand has articulated a shape and size of the human hand withfive fingers through a network of 38 tendons each with a singleengine supports the forearm.
The main features of the DLR from the hand of the other robot cancontrol it its rigidity. The engine can strain the tendon, which thehand can to absorb the shock of the violence. In one study, theresearcher's hand collided with a baseball bat the effects of the66th G Good hands.
The video below shows the movement of the fingers and wasbeaten with a hammer and metal bars:
DLR team did not want to build a copy of the correct anatomy of the human hand, like other teams. They want to hand, which can lead asa human hand in terms of both skill and strength.The hand has 19 degrees of freedom, or just one less than the real thing, and your fingers can move independently of each other toidentify different objects. The radius can be up to 30 Newton force of the fingertip, which makes this hand is also one of the most powerfulever built.

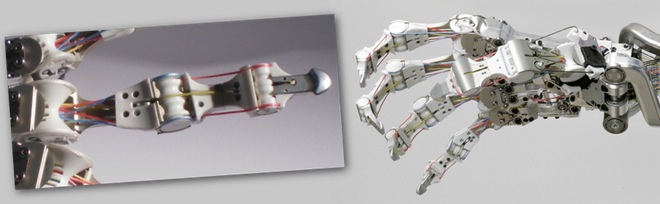
Another key element in the design of the DLR is a spring mechanism that is attached to each tendon. This [photo left] springsto yield the tendon, which is made from super strong synthetic fibercalled Dyneema, greater flexibility, allowing fingers to absorb andrelease energy, just as our own hands. This capability is key to achieving sustainability and to mimic the properties of thekinematics, dynamics and force the hand of man.

During normal operation, the finger joints can rotate 500 degrees per second. With the spring tension, then release their energy to produce more torque, speed can reach 2000 degrees per joint second. This means that the robot hand can do something few, if any, are: finger pressure.
Why build a super strong hand?
Mark Grebenstein, lead designer's hand, said that the robot is built by hand the rigid, although they look Terminator-drive, relatively fragile. Even a small collision with the police a few tens of Newton,can move the joints and fingers to tear apart.
"If every time the robot knocked on his hands, arms broken, we will have a big problem distribution service robots in the real world,"said Grebenstein.
To change its stiffness, DLR hand drive using known antagonists.The joints of each [photo below] finger is driven by two tendons,each attached to the motor. When the motors rotate in the same direction, movement joints, as they rotate in the opposite direction,which tightened together.

Before developing a new hand, Grebenstein has designed another advanced robot, Justin humanoid. He said that in the experiment throwing heavy balls and Justin have to try to catch them. "The impact would be a distortion of the joints beyond their borders and kill your fingers," he said. New hand can catch a ball thrown several yards. Mechanisms for implementation and spring can absorb the kinetic energy without structural damage. But hands can not always be stiff. For tasks that require precise handling, better to have a hand with low stiffness. By adjusting the machine tendon, could DLR hand. To operate by hand, researchers used a special sensor gloves or simply send take command. The control system is based on joint angle control. He does not need to control impedance, Grebenstein said, because the hand is compliance in mechanics. To detect if an object is soft and should be treated more gently, the steps to force the hand with a track extension of the spring mechanism. "In terms of grip and agility, we are very close to the human hand, he said, adding that the new hand is" miles ahead "of Justin's hand. About 13 people work on the one hand, and Grebenstein emphasize that it is difficult to estimate the project cost. But he said the cost of the hand between 70,000 and € 100,000. Researchers are trying to build a trunk full of two arms called the DLR Hand Arm System. Their plan is to explore innovative strategies to capture and manipulation, including manipulation with both hands. Grebenstein hope that their new approach to design by hand will help you progress in the field of service robots. He said the robotic equipment is now limiting new development because it is expensive and the researchers were not able to perform experiments that could damage them. "The problem is, he says," you can not learn without experience. "


Very, very nice!
ReplyDeleteThanks Mr Forrest. I am really and very..very like the hand design....
ReplyDeleteI do, too. The design seems to be unnecessarily complex, though. I tend to think that more could be achieved with the hand done by Shadow Robot arm
ReplyDeletehttp://www.shadowrobot.com/gallery.shtml?gallery=handC5r_061102&img=c5_Hand_on_Biomorphic_Arm.jpg
Mind, I don't like their use of pneumatics.