Robonaut 2 ( R2 ) is the first humanoid robot in space. Robonaut 2 is developed by collabaration of Nasa and GM. Robonaut target is to help humans perform their jobs on earth or on Space ( ISS - International Space Station ).
Robonaut 2 delivered to space through Mission STS-133 was launched into space on february 24th, 2011.
The robotic gripper that adapts to all parts, simply.
Robotiqis developed by Quebec company. Robotiq is very interesting robotic gripper that can adapt to various types of objects.
How it works
3 articulated fingers and 4 grasping modes to pick a wide variety of sizes and shapes.
Send simple open-close commands and let the gripper adapts to any geometry.
Control the closing speed, force, do partial closing / opening.
Receive grip detection feedback from the gripper.
Embedded gripper controller communicating with the robot controller over Ethernet/IP, Modbus RTU, DeviceNet or EtherCAT. Program from the teach pendant.
Electric gripper, comes with the mechanical mount for your robot. Has two connectors on the side for 24V power supply and communication.
Katsuhisa Ito is a hobbyist who has been creating small robots since 1992. Roughly 10 years later, he got around to building his dream project – his own humanoid – whenever he had the time and money to work on it. Before building SILF H2, Katsuhisa Ito has been creating many small robots, SILF H1 and then SILF H2.
The equations used in the calculator to determine the torque required at any given lifting joint (raising the arm vertically) in a robotic arm are presented here. Note that the term "actuator" is used rather than motor because not all robotic arms necessarily use servo motors (some may use pneumatics, hydraulics, etc.).
Torque (T) is defined as a turning or twisting “force” and is calculated using the following relation:
The force (F) acts at a length (L) from a pivot point. In a vertical plane, the force acting on an object (causing it to fall) is the acceleration due to gravity (g = 9.81m/s2) multiplied by its mass:
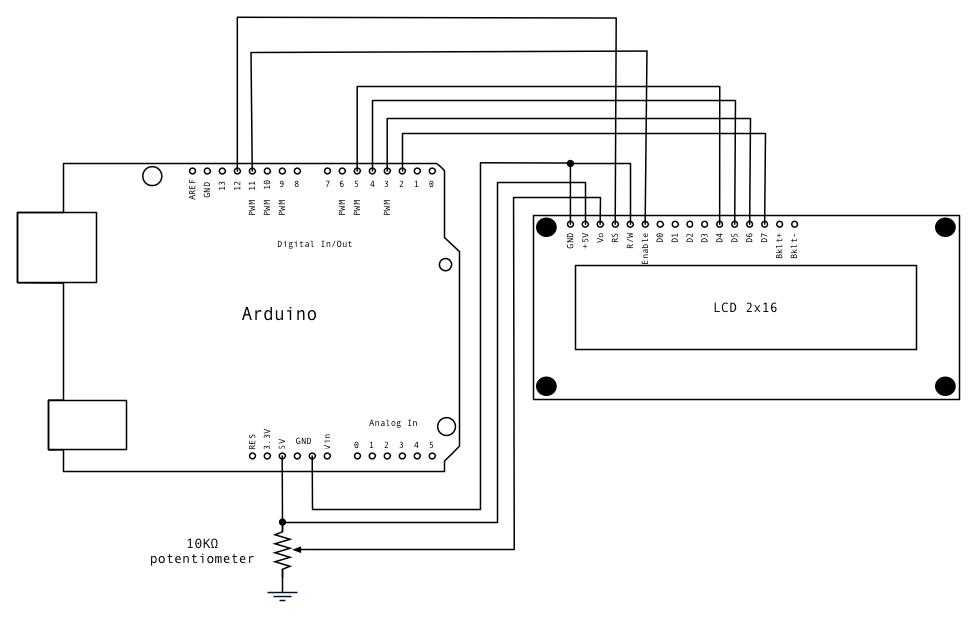
The Arduino website offers free resources and tutorials as well as a language reference to help you understand the code and syntax. In order to get started, you will at the very minimum need an Arduino board. Note that all the Arduino (and most of the clone boards) can use the Arduino software. If you are unsure what hardware to get, the Arduino USB is currently the most popular model
Windows Connection and Setup
Hardware: none
Go to www.arduino.cc to download the latest version of the Arduino software (Direct link:http://arduino.cc/en/Main/Software and select your operating system; in this case we are using Windows)
Save the ZIP file to your desktop (you can move or delete it later)
Create a new folder called “Arduino” under “Program Files”. To do this, go to “My computer” -> “C:” (or the drive where the operating system is installed) -> “Program Files”, then left click once on “program Files” folder, then select “New”->”Folder” from the main Explorer menu.
Extract the entire ZIP folder to this new “Arduino” folder
To run the Arduino software, open Windows Explorer by pressing the windows key (usually between the Ctrl and Alt keys on your keyboard) and the ‘E’ character at the same time (there are other ways to access explorer as well).
Go to “My computer” -> “C:” (or the drive where the operating system is installed) -> “Program Files” -> “Arduino” In this folder you will see an executable file (Blue colored icon), you can left click (once) and then right click and select “send to” -> Desktop (create shortcut) to have Arduino more easily accessible.
Double click the icon to start the software. The Arduino Software is ready to use.
Here in Odaiba Miraikan. The National Science Museum, tells us clearly the results of research in a variety of attractions and the latest scientific knowledge, From young children to the elderly, anyone who is a popular spot to enjoy.
Speaking of the permanent exhibition of this popular event, so The real biped robot by Honda's Asimo, The robotic stage.
LM35 is a temperature sensor from National Semiconductor that have a high accuracy. The output of analog voltage and has a measurement range of -55 º C to +150 º C with an accuracy of ± 0.5 º C. Output voltage is 10mV / º C. Output ports can be directly connected to Arduino, because Arduino has 6 ADC ports (analog input).
One of the conveniences that exist on the Arduino is a serial communication function that has been bundled in the Arduino software. With the serial function, then the Arduino can communicate two ways with PC using a program created with Visual Basic 6.
In this project, we will combining the Digital Data and Analog Data. How to receive and transmit Digital and Analog Data from Arduino to PC and vice versa.
The Arduino Uno is a microcontroller board based on the ATmega328 replaced old version Arduino called Arduino Duemilanove. Arduino Uno will initially be named Arduino Uno Punto Zero (Italian) which means Arduino 1.0. However, that name is to long, so to be short and easily remembered by the world, finally selected the name Arduino Uno, orArduino version 1.0
Arduino Uno has significant changes compared with the change of board Diecimila to Duemilanove (2009).
"ornithopter," the Nano-Hummingbird, developed by the company AeroVironment Inc., the miniature spybot looks like a hummingbird complete with flapping wings, and is only slightly larger and heavier than most hummingbirds, but smaller than the largest species.
The ornithopter can fly into buildings under the control of an operator flying the spybot with the help of a feed from its tiny video camera. The prototype is capable of flying at speeds of up to 18 km/h (11 mph) and weighs 19 grams, which is about the same as an AA battery.
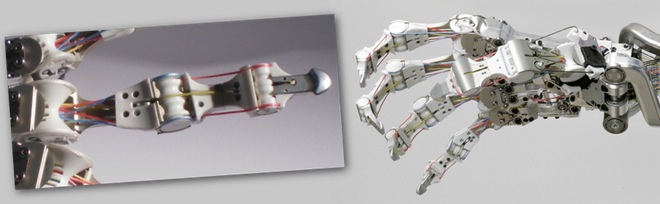
German researchers may have an anthropomorphic robot handthat a collision with hard objects, and even the strike, without breaking into pieces survive Hammer built.
In designing the new site, a researcher at the Institute of Roboticsand Mechatronics, German Aerospace Center, part of the (DLR),focused on resilience. You may only have built a robot hand of themost difficult yet.
DLR hand has articulated a shape and size of the human hand withfive fingers through a network of 38 tendons each with a singleengine supports the forearm.
The main features of the DLR from the hand of the other robot cancontrol it its rigidity. The engine can strain the tendon, which thehand can to absorb the shock of the violence. In one study, theresearcher's hand collided with a baseball bat the effects of the66th G Good hands.
Japanese researchers have developed a robotic bird that can movefreely in the air with rapid wing movement. Robot bird has a sizesimilar to a real bird Hummingbird, equipped with micro motors and four wings that can flaps 30 times per second, said HiroshiLiu, a researcher at the University of Chiba east of Tokyo.
Professor Hiroshi Ryu of Japan's Chiba University displays his flying robot, which flaps its wings 30 times per second like a hummingbird, at his laboratory in Chiba city, suburban Tokyo, December 28.
This unique robot has a weight of 2.6 gram, can fly 8 times morestable than a helicopter with propeller. This bird robot is controlled by infrared sensors and can move up, down, right or left.
Hiroshi Liu plans to make it float to rest at one point in the air, andequip it with a micro camera in March 2011.
This robot development cost 200 million yen ($ 2.1 million), can be used to help rescue people trapped in damaged buildings, looking for criminals or even operate as a vehicle probe on Mars.
The world's smallest brushless DC servomotor, the FAULHABER series 2232/2250 BX4 CSD/CCD from MICROMO, combines the advantages of the BX4 four-pole brushless technology with a single-axis motion controller.
MICROMO introduces an addition to its FAULHABER BX4 range of four-pole brushless DC servomotors with the introduction of the series 2232/2250 BX4 CSD/CCD, the world’s most compact drive with an integrated motion controller. This new series combines all the advantages of the BX4 four-pole brushless technology with a single-axis motion controller. High reliability, high torque, compact slotless design with no cogging torque, and robust construction without the use of adhesives make this new series ideal for complex application areas such as robotics, automation, medical and laboratory technology, specialty machinery, and aerospace/defense.