When she was on the Cal Tennis Club, Yoko “Yoky” Matsuoka (B.S.’93 EECS) dreamed of creating a robotic opponent that could return balls to her over the net. That bot never materialized, but her desire to build it launched a groundbreaking career that earned her a 2007 MacArthur “genius” award, a no-strings-attached, $500,000 honor from the John D. and Catherine T. MacArthur Foundation recognizing Matsuoka’s bold research in neurobotics—neuroscience meets robotics—most notably her efforts in developing a brain-powered prosthetic hand.
A native of Japan, Matsuoka grew up in Santa Barbara, California. After graduating from Berkeley, she earned her master’s and doctorate at MIT, then joined the faculty at Carnegie Mellon. In 2006, she joined the University of Washington, where she is now associate professor of computer science and engineering and on the research team at UW’s Neurobotics Lab.
“Moving forward 25 to 30 years, we have to achieve very dexterous behavior,” Matsuoka says. Current prosthetic options are stiff and provide only limited motion. But her approach could give amputees the ability to operate a replacement limb without, well, giving it a second thought.
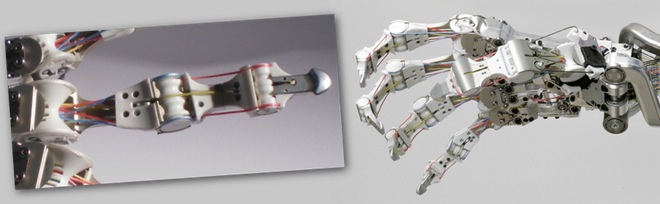
Matsuoka and team modeled a robotic prosthesis on an actual human appendage and wired it to function like the real thing. The device incorporates lifelike “bones” made from composite that articulate when mini-motors drive nylon polymer “tendons” to curl or flex a finger. In place of the brain signals that control movement in a normal hand, this creation uses neural data from real patients, transformed by algorithms into pulses that drive the motors. Matsuoka hopes that one day, an amputee will be able to attach the limb and operate it just as they would a biological one—with brain power.
“Assume you’re missing your arm, and we give you a complex robotic prosthesis that has nothing to do with how your brain actually controls your arm,” she says. “If we can provide a system that looks and functions like a real system, your brain doesn’t have to work as hard to control it.”
Matsuoka also built a robotic arm that safely guides individuals recovering from strokes and other neurological problems through their physical therapy regimes. With her newfound MacArthur funding, she has visions of starting a company, “writing a book or three” and working with K–12 institutions, all with the goal of speeding up the timetable for bringing neurobotic technology into our daily lives.




Great job! Original Article from here