In this Project, we want to control servo motor potitions from analog sensor ( potentiometer or flex sensor ).
The Hardware

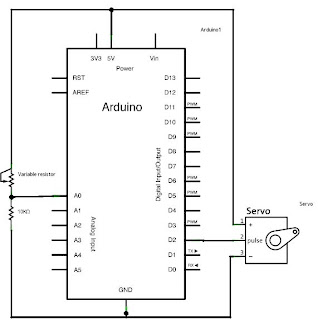


As shown at picture, connect analog input to Arduino analog pin 0. don't forget about 10K resistor. Connect an Servo motor ( yellow wire ) to Arduino Digital pin 2 and then connect the red and black wires go to +5V and ground, respectively. Refer to the picture and scheme to do this.
The Program
Here we will use 2 method to control an servo motor.
1. Pulse Method
This method is more complex and exposes the math and timing required to control a servo with a microcontroller.
/*
Servo control from an analog input
The minimum (minPulse) and maxiumum (maxPulse) values
will be different depending on your specific servo motor.
Ideally, it should be between 1 and 2 milliseconds, but in practice,
0.5 - 2.5 milliseconds works well for me.
Try different values to see what numbers are best for you.
This program uses the millis() function to keep track of when the servo was
last pulsed. millis() produces an overflow error (i.e. generates a number
that's too big to fit in a long variable) after about 5 days. if you're
making a program that has to run for more than 5 days, you may need to
account for this.
by Tom Igoe
additions by Carlyn Maw & Rob Faludi
Created 28 Jan. 2006
Updated 10 Jun. 2008
*/
int servoPin = 2; // Control pin for servo motor
int minPulse = 500; // Minimum servo position
int maxPulse = 2500; // Maximum servo position
int pulse = 0; // Amount to pulse the servo
long lastPulse = 0; // the time in milliseconds of the last pulse
int refreshTime = 20; // the time needed in between pulses
int analogValue = 0; // the value returned from the analog sensor
int analogPin = 0; // the analog pin that the sensor's on
void setup() {
pinMode(servoPin, OUTPUT); // Set servo pin as an output pin
pulse = minPulse; // Set the motor position value to the minimum
Serial.begin(9600);
}
void loop() {
analogValue = analogRead(analogPin); // read the analog input
pulse = map(analogValue,0,1023,minPulse,maxPulse);// convert the analog value
// to a range between minPulse
// and maxPulse.
// pulse the servo again if rhe refresh time (20 ms) have passed:
if (millis() - lastPulse >= refreshTime) {
digitalWrite(servoPin, HIGH); // Turn the motor on
delayMicroseconds(pulse); // Length of the pulse sets the motor position
digitalWrite(servoPin, LOW); // Turn the motor off
lastPulse = millis(); // save the time of the last pulse
}
}
This code was written with a potentiometer in mind, so it assumes you're going to get values from 0 to 1023 from the sensor. If you don't, the servo won't move through its whole range. Determine the range of numbers the sensor is giving you and adjust the servo formula to fit. To fix this, use the map() function. You know the input range is the range of the sensor, 0 to 1023. And you know the output range is from minPulse to maxPulse. So do this:
pulseWidth = map(analogValue, 0, 1023, minPulse, maxPulse);
2. Using the Arduino Servo LibraryThe second example shows you how to control a servo motor using the Arduino Servo library. This library is very easy to use and is much easier to follow. However, it obscures all the calculations and handles the dirty work for you. This is useful once you've attempted the pulse method and understand it completely.
/*
Servo control from an analog input using the Arduino Servo library
This example code uses the Arduino Servo library which comes packaged with the Ar duino software.
In order to make this work, you must include the Servo.h library file, create an instance of the Servo object.
attach a pin to the Servo object, and then write an analog value to the Servo obj ect to set its position.
The difference between using the Servo library and the older method of pulsing a digital pin is that the library
handles a lot of the work for you. You no longer need to figure out the translati on between pulse length and position.
You now can simply specify the angle you'd like your servo to be at and it will t urn to that position.
Updated 08 Sep 2009
by Rory Nugent
Created 20 Jan 2009
by Tom Igoe
*/
#include <Servo.h> // include the servo library
Servo servoMotor; // creates an instance of the servo object to control a servo
int analogPin = 0; // the analog pin that the sensor is on
int analogValue = 0; // the value returned from the analog sensor
int servoPin = 2; // Control pin for servo motor. As of Arduino 0017, can be any pin
void setup() {
servoMotor.attach(servoPin); // attaches the servo on pin 2 to the servo object
}
void loop()
{
analogValue = analogRead(analogPin); // read the analog input (value between 0 and 1023)
analogValue = map(analogValue, 0, 1023, 0, 179); // map the analog value (0 - 1023) to the angle of the servo (0 - 179)
servoMotor.write(analogValue); // write the new mapped analog value to set the position of the servo
delay(15); // waits for the servo to get there
}
No comments:
Post a Comment